マガジン位置(番地)検出方法
マガジン位置検出方法には絶対位置検出とカウント検出の2通りあります。 それぞれの概要に加え長所と短所を図付きで解説していきます。
絶対位置検出方式
ポジション検出機をマガジンに取り付け、割り出し番地を直接の信号で検出する方式。
例:直接信号
BCDコード:1,2,4,8,10,20・・・
BINコード:1,2,4,8,16,32・・・
《長所》
・割り出したツールホルダ位置を直接読み取れる。
《短所》
・検出機器が高価(ロータリーエンコーダなど)
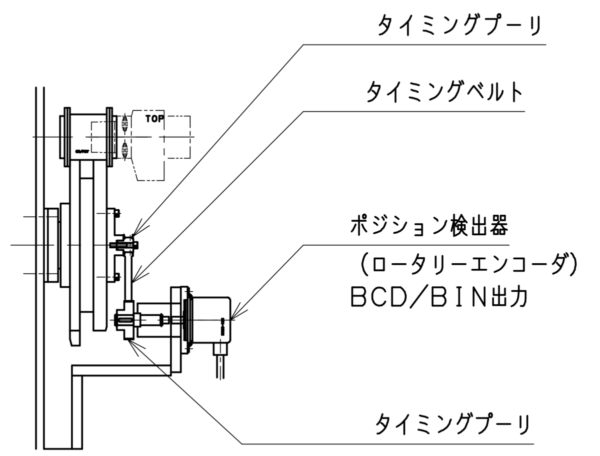
・ドラムタイプマガジンは直接取り付け可能ですが、チェーン式マガジンの場合には、駆動軸と検出器との間をタイミングベルト&プーリ等でつなぎマガジン1回転と検出器1回転を合わせます。
本数専用の検出器、タイミングプーリ、ベルトが必要になります。
・入力信号が多い(40本列 BINコード:1,2,4,8,16,32TPの7入力)
・マガジン本数が多くなると分割数も増えて信号機が狭くなり、センタリング調整が難しくなる。
(検出器信号幅:360°/本数→本数に対し信号幅は反比例)
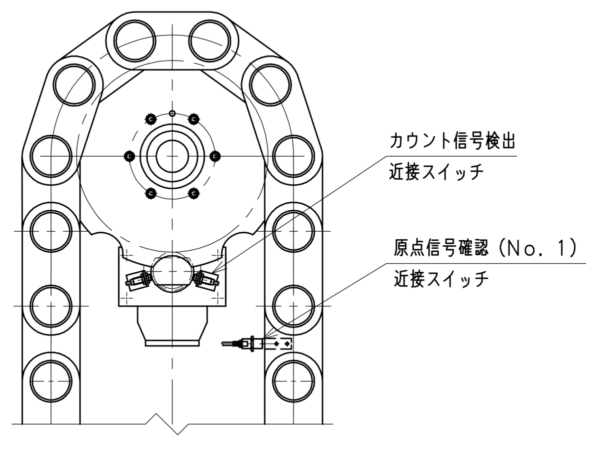
カウント検出方式
マガジンチェーンの回転に連動するドッグあるいはドッグ相当のものをセンサでカウント(ON/OFF)し、原点センサとの相対位置で割り出し番地を検出する方式。(原点に対して+(プラス)カウントor-(マイナス)カウント。)
《長所》
・センサは近接スイッチが使用可能で安価
・マガジン本数による制約はなく、同じ検出機構が使用可
・入力信号が少ない
・センタリング調整が不要(もしくは容易)
《短所》
・番地を記憶保持していないと現在の番地が分からず起動ごとに原点割り出しが必要
・ミスカウントが発生しても即座に判別不可能
・原点確認処理が必要(初期の原点出し、あるいは稼働中のフィードバック処理)