6軸多関節ロボットシステム導入による自動化
オートツールチェンジャー(ATC装置)・オートパレットチェンジャー(APC装置)・ガントリーローダー装置は工作機械(本機)の周辺装置としてツール交換・ワーク交換等の役割を担っています。ロボットの定義でいえば、ATC装置・APC装置・ガントリーローダー装置もロボットに含まれるでしょう。しかし皆さんが思うロボットは、垂直多関節ロボットではないでしょうか。ここでは、6軸多関節ロボットを使用し、ガントリーローダーに変わる可能性を紹介いたします。
まず、6軸多関節ロボットの動きです(体の動きで説明)垂直多関節ロボットは「人間の動きに似ている」ことです。6軸の垂直多関節ロボットの機能と軸を、人間の体・腕・手首・手に対応させると、次のようになります。
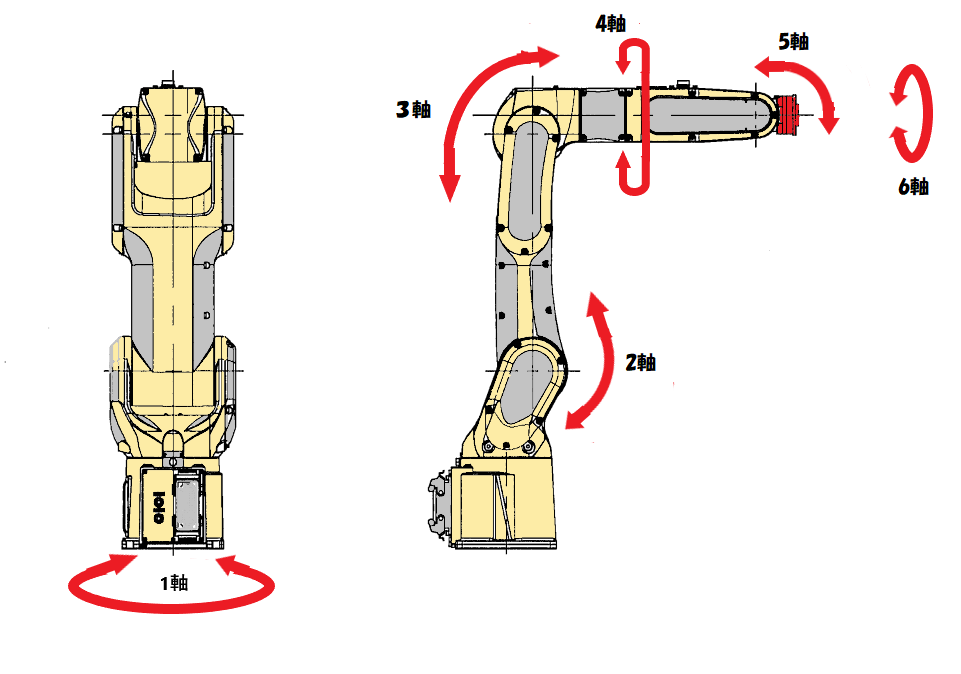
- 1軸 旋回 体を回転させる軸
- 2軸 下腕 体を前後に動かす軸
- 3軸 上腕 腕を上下に動かす軸
- 4軸 旋回 腕を回転させる軸
- 5軸 手首曲げ 手首を上下に振る軸
- 6軸 手首回転 手首を回転させる軸
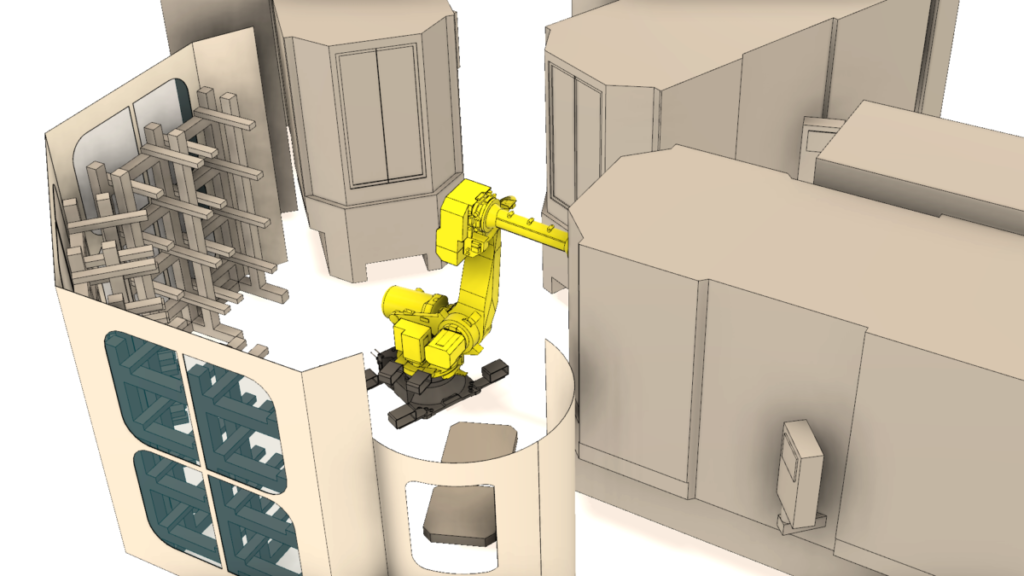
6軸多関節ロボットを使用し工作機械へのワーク搬入・搬出の方法も様々です。
・ロボットを中心に固定し、搬出入装置・加工機を周囲に配置する方法
・加工機の前を、多関節ロボットが走行しワークの搬入出を随時行う方法(ロボット走行式)
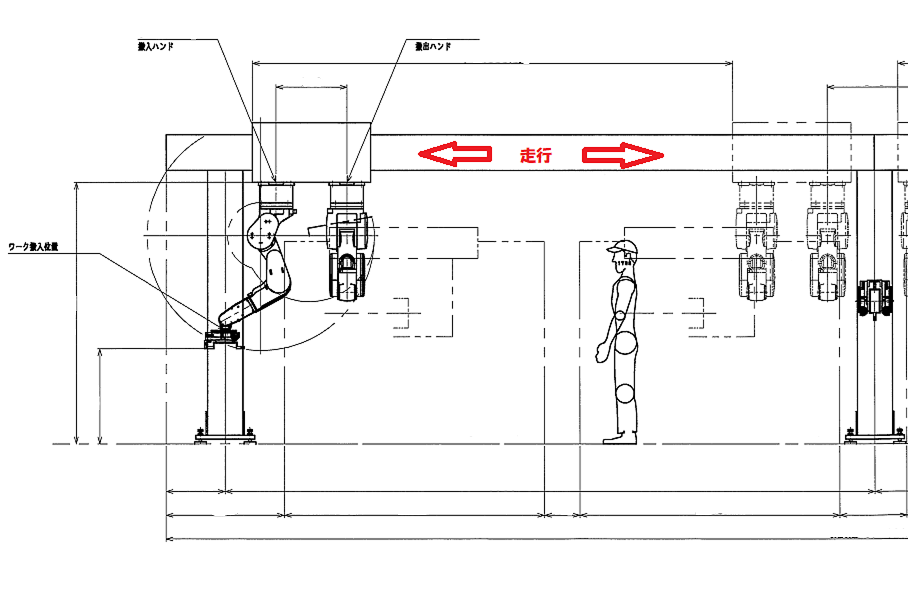
・ガントリーローダー走行軸に、6軸多関節ロボットを天吊り型にし各工程に搬送させる方法
弊社設計製作ガントリーローダーは、直線的な動き(走行軸・上下軸・ハンド)で成り立っています。加工機へのアプローチは加工機の天井から上下軸により侵入しローダーハンドにてワークの搬入出を行います。

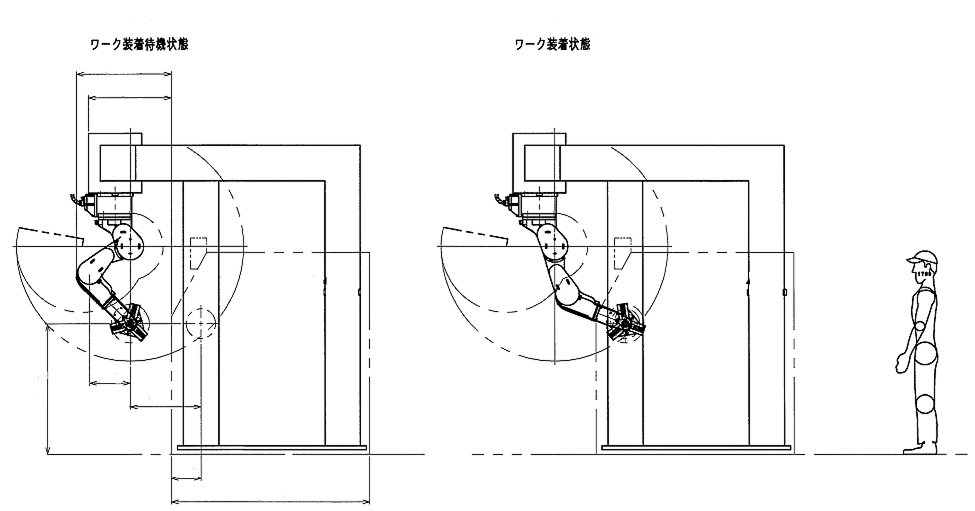
加工機(本機)によっては天井からアプローチ出来ないものもあります。そのような場合は前面の走行式ロボットか、これから紹介するガントリーローダーの走行軸にロボットを天吊りにし加工機の前面扉からアプローチするガントリー式天吊り型ロボット搬送装置です。仕様はワーク搬入装置・ロボット搬入ハンド・ロボット搬出ハンド・ワーク反転機能・ワーク搬出装置になります。ガントリーローダーの直線的な動きから、多関節ロボットの曲線的な動きによりワーク搬送の自由度が増します。
エイ・テイ・シイ(株)では、オートツールチェンジャー(ATC装置)・オートパレットチェンジャー(APC装置)ガントリーローダー装置はもとより、ロボットシステムの構築に励んでおります。ロボット本体はロボットメーカーのものですが、ワークやツールを掴むハンド等の仕様設計製作は弊社の分野になります。またユーザー様の現場での最適なロボットシステムを構築するために必要な機械装置を検討させて頂きます。工作機械周辺装置設計製作で、長年の実績がありますエイ・テイ・シイ(株)に是非ご相談下さい。